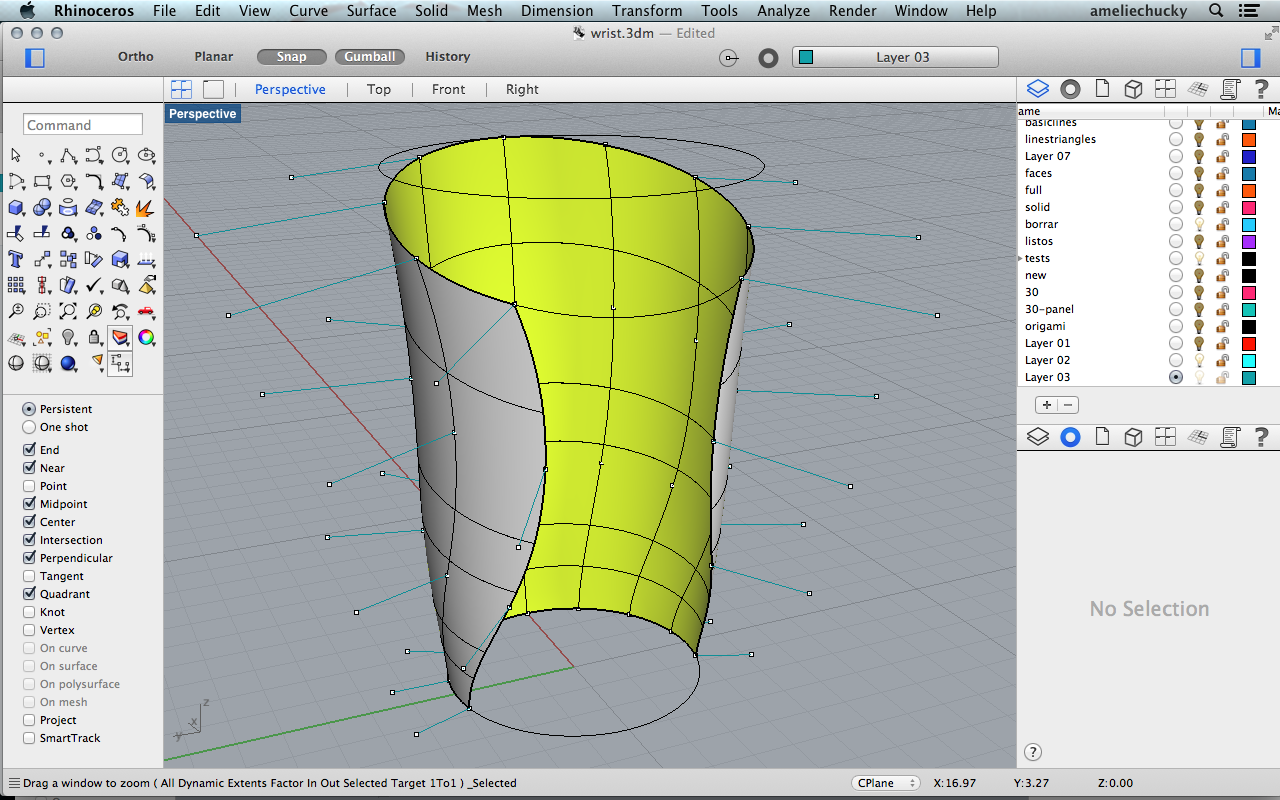
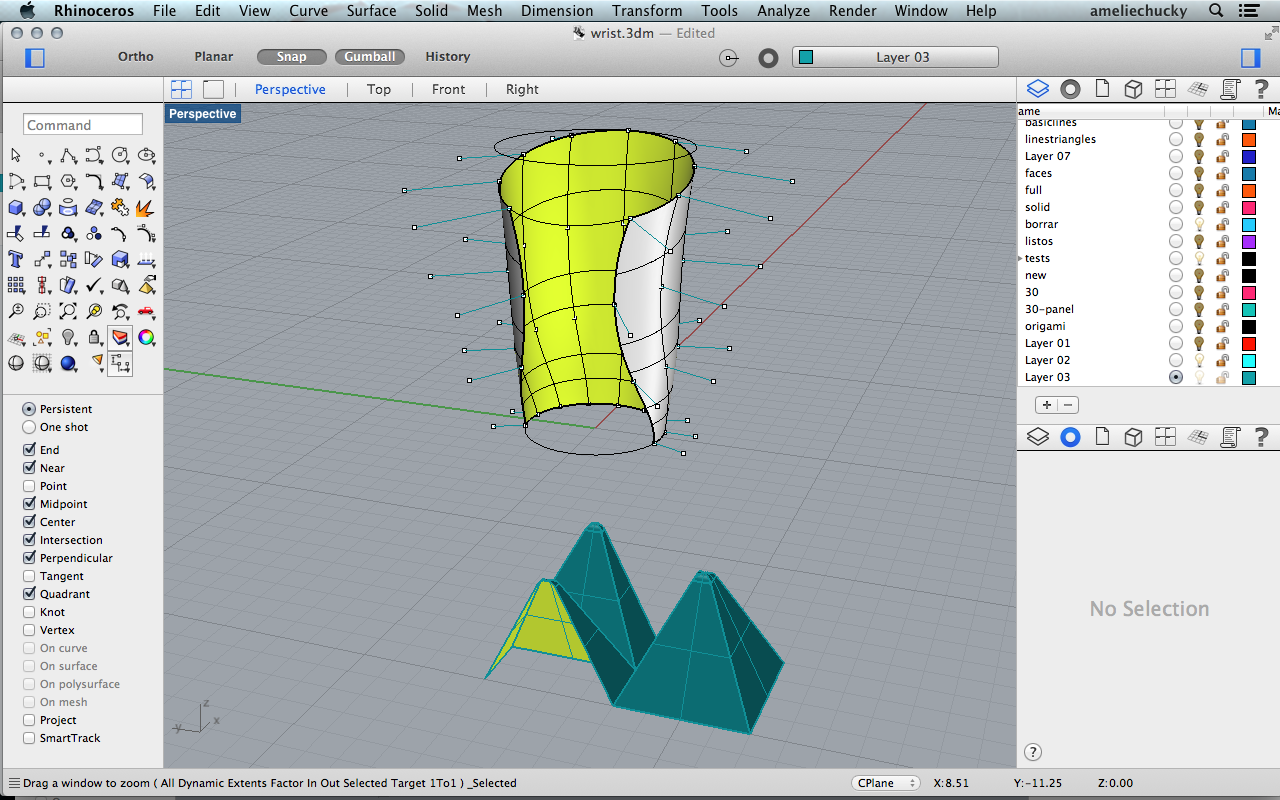
This is our first approach for an arm wrist that will hold the muscle sensors.
This iteration considers an unique object, but it is difficult to make it adjustable for any size of arm.
We printed one version using PLA on the 3D printer in the studio and another one 3D printed with powder, in a SLA 3D printer.
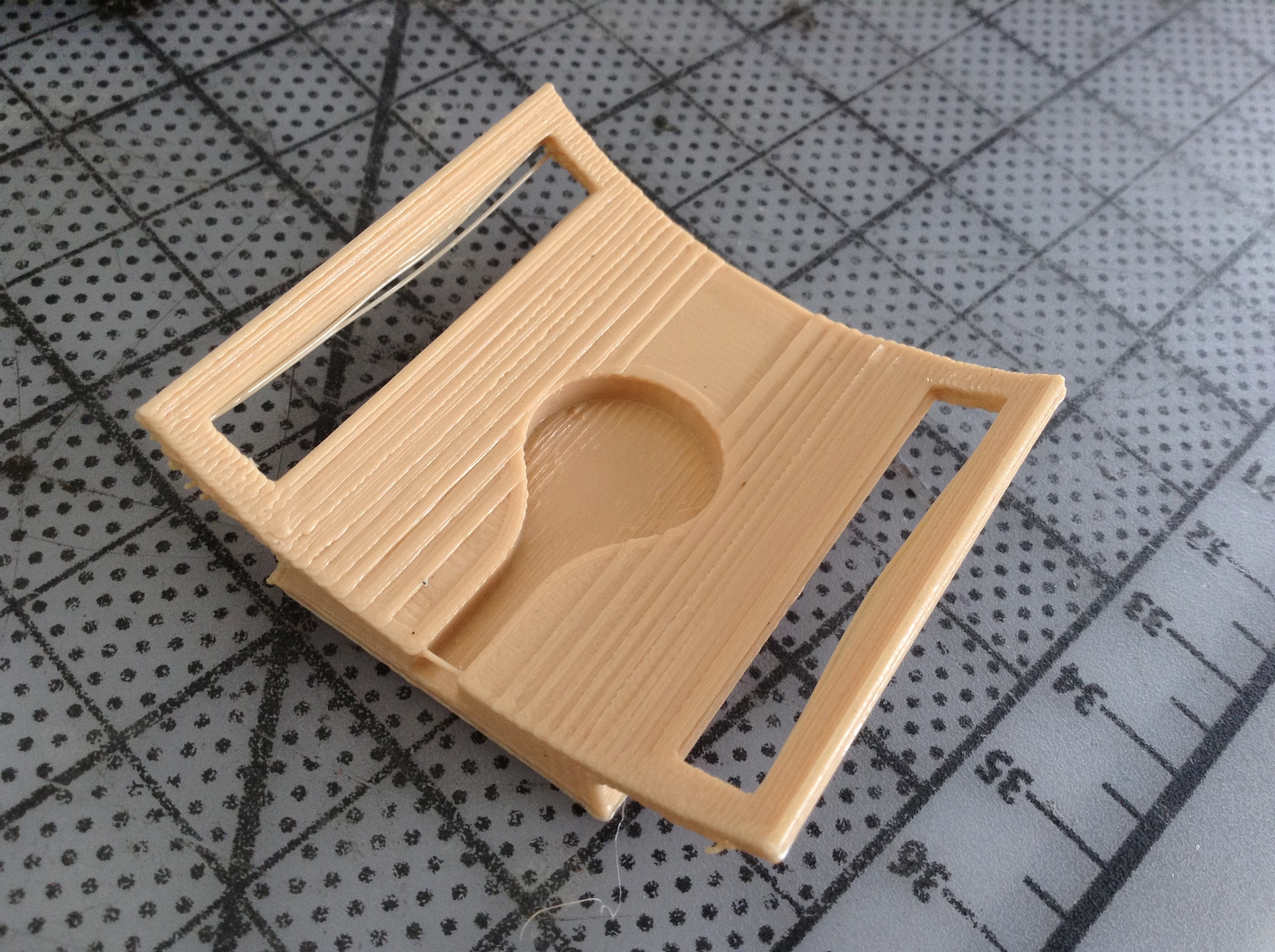






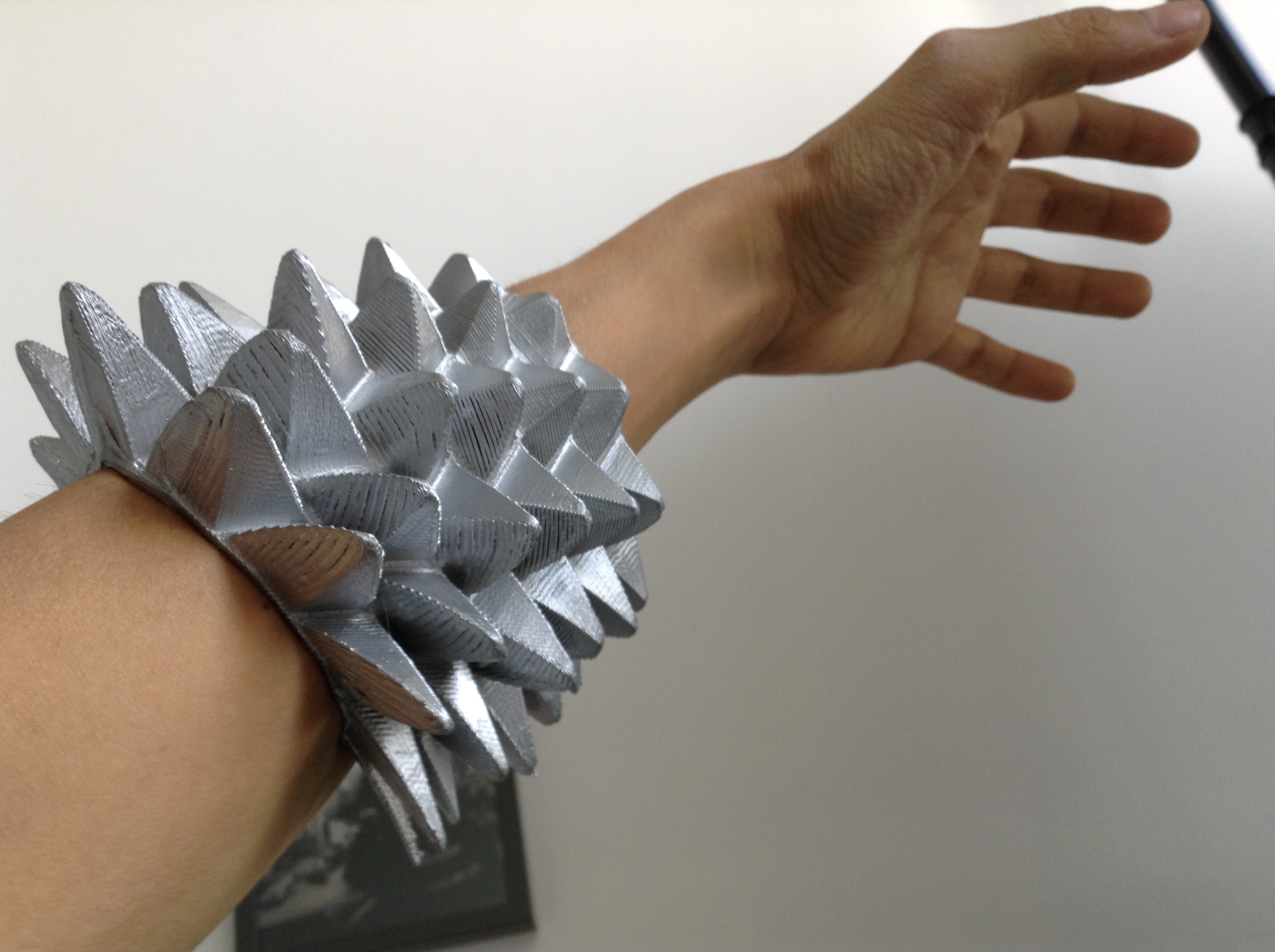
SLA version looks better but is more fragile.